


Houghova transformace
Vstup: obrazVýstup: pozice hledaných objektu
Cíl: nalézt v obraze objekty popsané mat. funkcí
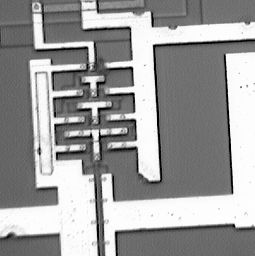
Hledání přímek
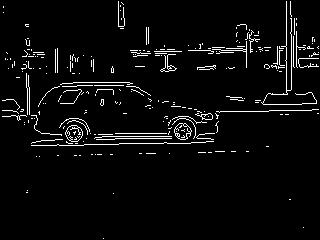
vstupní obraz
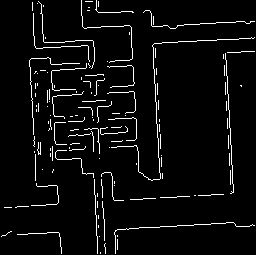
obraz hran
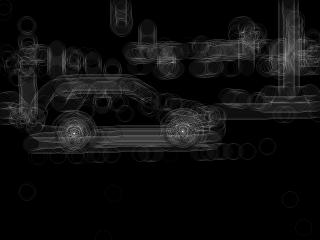
radonova transformace
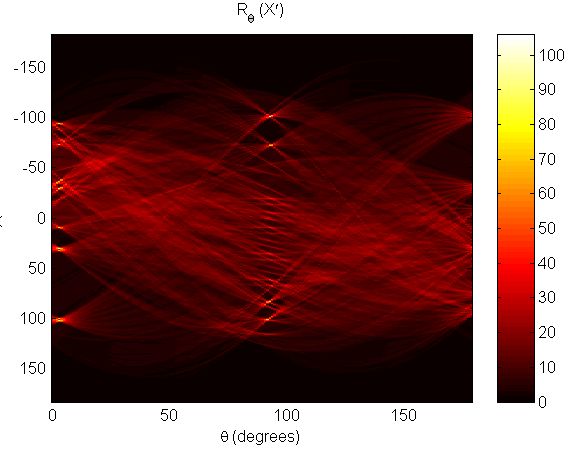
nalezení maxim
výstup

Hledání kružnic
vstupní obraz

obraz hran
obraz pro poloměr r=8
výstup
3D vidění
systém zrcadel zajišťující dva různé pohledy (stereo-vidění)


kalibrace scény pomocí objektu se známou geometrií


využití epipolární geometrie pro nalezení bodů v druhém pohledu podle označených (nalezených) bodů v prvním pohledu


ukázka nalezení významných bodů pro 3D rekonstrukci objektu

zrekonstruovaný objekt reprezentovaný pomocí trojúhelníků ve skutečném měřítku


příklady matlab,hough hough An optimized Hough transform for circle detection
